|
Debug Draw 3D (and 2D) 1.4.5
Draw 3D debug graphics and 2D overlays with this add-on.
|
|
Debug Draw 3D (and 2D) 1.4.5
Draw 3D debug graphics and 2D overlays with this add-on.
|
Singleton class for calling debugging 3D methods. More...
#include <debug_draw_3d.h>

Public Types | |
| enum | PointType : int { POINT_TYPE_SQUARE , POINT_TYPE_SPHERE } |
Public Member Functions | |
| Ref< DebugDraw3DScopeConfig > | new_scoped_config () |
| Ref< DebugDraw3DScopeConfig > | scoped_config () override |
| void | set_config (Ref< DebugDraw3DConfig > cfg) |
| Ref< DebugDraw3DConfig > | get_config () const |
| Color | get_empty_color () const |
| void | set_debug_enabled (const bool &state) |
| bool | is_debug_enabled () const |
| Ref< DebugDraw3DStats > | get_render_stats () |
| Ref< DebugDraw3DStats > | get_render_stats_for_world (Viewport *viewport) |
| void | regenerate_geometry_meshes () |
| void | clear_all () |
| void | draw_sphere (const Vector3 &position, const real_t &radius=0.5f, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_sphere_xf (const Transform3D &transform, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_cylinder (const Transform3D &transform, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_cylinder_ab (const Vector3 &a, const Vector3 &b, const real_t &radius=0.5f, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_box (const Vector3 &position, const Quaternion &rotation, const Vector3 &size, const Color &color=Colors::empty_color, const bool &is_box_centered=false, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_box_ab (const Vector3 &a, const Vector3 &b, const Vector3 &up, const Color &color=Colors::empty_color, const bool &is_ab_diagonal=true, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_box_xf (const Transform3D &transform, const Color &color=Colors::empty_color, const bool &is_box_centered=true, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_aabb (const AABB &aabb, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_aabb_ab (const Vector3 &a, const Vector3 &b, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_line_hit (const Vector3 &start, const Vector3 &end, const Vector3 &hit, const bool &is_hit, const real_t &hit_size=0.25f, const Color &hit_color=Colors::empty_color, const Color &after_hit_color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_line_hit_offset (const Vector3 &start, const Vector3 &end, const bool &is_hit, const real_t &unit_offset_of_hit=0.5f, const real_t &hit_size=0.25f, const Color &hit_color=Colors::empty_color, const Color &after_hit_color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_line (const Vector3 &a, const Vector3 &b, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_ray (const Vector3 &origin, const Vector3 &direction, const real_t &length, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_lines (const PackedVector3Array &lines, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_line_path (const PackedVector3Array &path, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_arrowhead (const Transform3D &transform, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_arrow (const Vector3 &a, const Vector3 &b, const Color &color=Colors::empty_color, const real_t &arrow_size=0.5f, const bool &is_absolute_size=false, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_arrow_ray (const Vector3 &origin, const Vector3 &direction, const real_t &length, const Color &color=Colors::empty_color, const real_t &arrow_size=0.5f, const bool &is_absolute_size=false, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_arrow_path (const PackedVector3Array &path, const Color &color=Colors::empty_color, const real_t &arrow_size=0.75f, const bool &is_absolute_size=true, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_point_path (const PackedVector3Array &path, const PointType type=PointType::POINT_TYPE_SQUARE, const real_t &size=0.25f, const Color &points_color=Colors::empty_color, const Color &lines_color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_points (const PackedVector3Array &points, const PointType type=PointType::POINT_TYPE_SQUARE, const real_t &size=0.25f, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_square (const Vector3 &position, const real_t &size=0.2f, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_plane (const Plane &plane, const Color &color=Colors::empty_color, const Vector3 &anchor_point=Vector3(INFINITY, INFINITY, INFINITY), const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_position (const Transform3D &transform, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_gizmo (const Transform3D &transform, const Color &color=Colors::empty_color, const bool &is_centered=false, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_grid (const Vector3 &origin, const Vector3 &x_size, const Vector3 &y_size, const Vector2i &subdivision, const Color &color=Colors::empty_color, const bool &is_centered=true, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_grid_xf (const Transform3D &transform, const Vector2i &p_subdivision, const Color &color=Colors::empty_color, const bool &is_centered=true, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_camera_frustum (const class godot::Camera3D *camera, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
| void | draw_camera_frustum_planes (const Array &camera_frustum, const Color &color=Colors::empty_color, const real_t &duration=0) FAKE_FUNC_IMPL |
Static Public Member Functions | |
| static DebugDraw3D * | get_singleton () |
Singleton class for calling debugging 3D methods.
You can use the project settings debug_draw_3d/settings/3d for additional customization.
For example, add_bevel_to_volumetric_geometry allows you to remove or add a bevel for volumetric lines.
use_icosphere and use_icosphere_for_hd allow you to change the sphere mesh.
_physics_process are processed separately from those created in _process, so they will be deleted only in the first physics tick after rendering. This allows to display objects even if several frames passed between physics ticks._physics_process and _process (and probably from other threads). It is worth mentioning that physics ticks may not be called every frame or may be called several times in one frame. So if you want to avoid multiple identical draw_ calls, you can call draw_ methods in _process or use such a check: draw_ methods in the first few frames immediately after the project is launched. | enum DebugDraw3D::PointType : int |
Appearance of points on the path
|
inlinestatic |
Get singleton. Not available in GDScript.
| Ref< DebugDraw3DScopeConfig > DebugDraw3D::new_scoped_config | ( | ) |
Create a new DebugDraw3DScopeConfig instance and register it.
This class allows you to override some parameters within scope for the following draw_* calls.
Store this instance in a local variable inside the method.
|
override |
Returns the default scope settings that will be applied at the start of each new frame.
Default values can be overridden in the project settings debug_draw_3d/settings/3d/volumetric_defaults.
| void DebugDraw3D::set_config | ( | Ref< DebugDraw3DConfig > | cfg | ) |
Set the configuration global for everything in DebugDraw3D.
| Ref< DebugDraw3DConfig > DebugDraw3D::get_config | ( | ) | const |
Get the DebugDraw3DConfig.
| Color DebugDraw3D::get_empty_color | ( | ) | const |
Get the color that is used as the default parameter for draw_* calls.
| void DebugDraw3D::set_debug_enabled | ( | const bool & | state | ) |
Set whether debug drawing works or not.
| Ref< DebugDraw3DStats > DebugDraw3D::get_render_stats | ( | ) |
Returns an instance of DebugDraw3DStats with the current statistics.
Some data can be delayed by 1 frame.
| Ref< DebugDraw3DStats > DebugDraw3D::get_render_stats_for_world | ( | Viewport * | viewport | ) |
Returns an instance of DebugDraw3DStats with the current statistics for the World3D of the Viewport.
Some data can be delayed by 1 frame.
| void DebugDraw3D::regenerate_geometry_meshes | ( | ) |
Regenerate meshes.
Can be useful if you want to change some project settings and not restart the project.
| void DebugDraw3D::clear_all | ( | ) |
Clear all 3D geometry
| void DebugDraw3D::draw_sphere | ( | const Vector3 & | position, |
| const real_t & | radius = 0.5f, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a sphere
| position | Center of the sphere |
| radius | Sphere radius |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_sphere_xf | ( | const Transform3D & | transform, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a sphere with a radius of 0.5
| transform | Sphere transform |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_cylinder | ( | const Transform3D & | transform, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a vertical cylinder with radius 0.5 and height 1.0
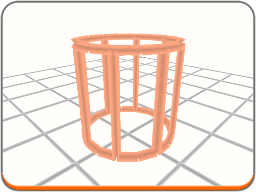
| transform | Cylinder transform |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_cylinder_ab | ( | const Vector3 & | a, |
| const Vector3 & | b, | ||
| const real_t & | radius = 0.5f, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a cylinder between points A and B with a certain radius
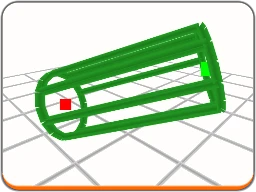
| a | Bottom point of the Cylinder |
| b | Top point of the Cylinder |
| radius | Cylinder radius |
| color | Primary color |
| duration | The duration of how long the object will be visible |
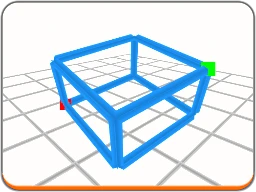
| void DebugDraw3D::draw_box | ( | const Vector3 & | position, |
| const Quaternion & | rotation, | ||
| const Vector3 & | size, | ||
| const Color & | color = Colors::empty_color, | ||
| const bool & | is_box_centered = false, | ||
| const real_t & | duration = 0 ) |
Draw a box
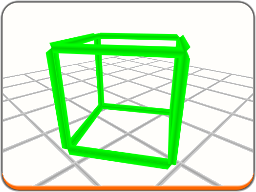
| position | Position of the Box |
| rotation | Rotation of the box |
| size | Size of the Box |
| color | Primary color |
| is_box_centered | Set where the center of the box will be. In the center or in the bottom corner |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_box_ab | ( | const Vector3 & | a, |
| const Vector3 & | b, | ||
| const Vector3 & | up, | ||
| const Color & | color = Colors::empty_color, | ||
| const bool & | is_ab_diagonal = true, | ||
| const real_t & | duration = 0 ) |
Draw a box between points A and B by rotating and scaling based on the up vector
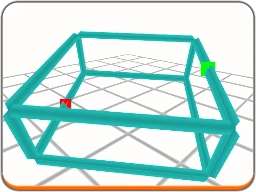
| a | Start position |
| b | End position |
| up | Vertical vector by which the box will be aligned |
| color | Primary color |
| is_ab_diagonal | Set uses the diagonal between the corners or the diagonal between the centers of two edges |
| duration | The duration of how long the object will be visible |
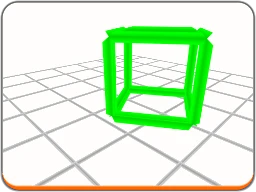
| void DebugDraw3D::draw_box_xf | ( | const Transform3D & | transform, |
| const Color & | color = Colors::empty_color, | ||
| const bool & | is_box_centered = true, | ||
| const real_t & | duration = 0 ) |
Draw a box as in DebugDraw3D.draw_box
| transform | Box transform |
| color | Primary color |
| is_box_centered | Set where the center of the box will be. In the center or in the bottom corner |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_aabb | ( | const AABB & | aabb, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a box as in DebugDraw3D.draw_box, but based on the AABB
| aabb | AABB |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_aabb_ab | ( | const Vector3 & | a, |
| const Vector3 & | b, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw the box as in DebugDraw3D.draw_aabb, but AABB is defined by the diagonal AB
| a | Start position |
| b | End position |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_line_hit | ( | const Vector3 & | start, |
| const Vector3 & | end, | ||
| const Vector3 & | hit, | ||
| const bool & | is_hit, | ||
| const real_t & | hit_size = 0.25f, | ||
| const Color & | hit_color = Colors::empty_color, | ||
| const Color & | after_hit_color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw line separated by hit point (billboard square) or not separated if is_hit = false.
Some of the default settings can be overridden in DebugDraw3DConfig.
| start | Start point |
| end | End point |
| hit | Hit point |
| is_hit | Whether to draw the collision point |
| hit_size | Size of the hit point |
| hit_color | Color of the hit point and line before hit |
| after_hit_color | Color of line after hit position |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_line_hit_offset | ( | const Vector3 & | start, |
| const Vector3 & | end, | ||
| const bool & | is_hit, | ||
| const real_t & | unit_offset_of_hit = 0.5f, | ||
| const real_t & | hit_size = 0.25f, | ||
| const Color & | hit_color = Colors::empty_color, | ||
| const Color & | after_hit_color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw line separated by hit point.
Similar to DebugDraw3D.draw_line_hit, but instead of a hit point, an offset from the start point is used.
Some of the default settings can be overridden in DebugDraw3DConfig.
| start | Start point |
| end | End point |
| is_hit | Whether to draw the collision point |
| unit_offset_of_hit | Unit offset on the line where the collision occurs |
| hit_size | Size of the hit point |
| hit_color | Color of the hit point and line before hit |
| after_hit_color | Color of line after hit position |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_line | ( | const Vector3 & | a, |
| const Vector3 & | b, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a single line
| a | Start point |
| b | End point |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_ray | ( | const Vector3 & | origin, |
| const Vector3 & | direction, | ||
| const real_t & | length, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a ray.
Same as DebugDraw3D.draw_line, but uses origin, direction and length instead of A and B.
| origin | Origin |
| direction | Direction |
| length | Length |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_lines | ( | const PackedVector3Array & | lines, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw an array of lines. Each line is two points, so the array must be of even size.
| lines | An array of points of lines. 1 line = 2 vectors3. The array size must be even. |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_line_path | ( | const PackedVector3Array & | path, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw an array of lines.
Unlike DebugDraw3D.draw_lines, here lines are drawn between each point in the array.
The array can be of any size.
| path | Sequence of points |
| color | Primary color |
| duration | The duration of how long the object will be visible |
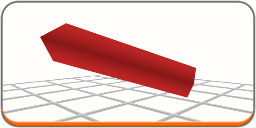
| void DebugDraw3D::draw_arrowhead | ( | const Transform3D & | transform, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw the arrowhead
| transform | Transform3D of the Arrowhead |
| color | Primary color |
| duration | The duration of how long the object will be visible |
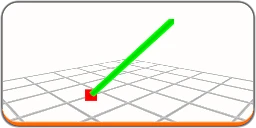
| void DebugDraw3D::draw_arrow | ( | const Vector3 & | a, |
| const Vector3 & | b, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | arrow_size = 0.5f, | ||
| const bool & | is_absolute_size = false, | ||
| const real_t & | duration = 0 ) |
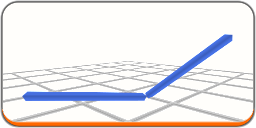
Draw line with arrowhead
| a | Start point |
| b | End point |
| color | Primary color |
| arrow_size | Size of the arrow |
| is_absolute_size | Is arrow_size absolute or relative to the length of the string? |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_arrow_ray | ( | const Vector3 & | origin, |
| const Vector3 & | direction, | ||
| const real_t & | length, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | arrow_size = 0.5f, | ||
| const bool & | is_absolute_size = false, | ||
| const real_t & | duration = 0 ) |
Same as DebugDraw3D.draw_arrow, but uses origin, direction and length instead of A and B.
| origin | Origin |
| direction | Direction |
| length | Length |
| color | Primary color |
| arrow_size | Size of the arrow |
| is_absolute_size | Is arrow_size absolute or relative to the line length? |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_arrow_path | ( | const PackedVector3Array & | path, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | arrow_size = 0.75f, | ||
| const bool & | is_absolute_size = true, | ||
| const real_t & | duration = 0 ) |
Draw a sequence of points connected by lines with arrows like DebugDraw3D.draw_line_path.
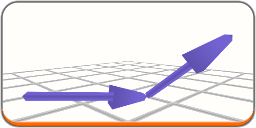
| path | Sequence of points |
| color | Primary color |
| arrow_size | Size of the arrow |
| is_absolute_size | Is the arrow_size absolute or relative to the length of the line? |
| duration | The duration of how long the object will be visible |
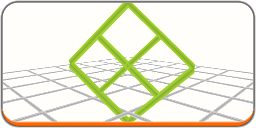
| void DebugDraw3D::draw_point_path | ( | const PackedVector3Array & | path, |
| const PointType | type = PointType::POINT_TYPE_SQUARE, | ||
| const real_t & | size = 0.25f, | ||
| const Color & | points_color = Colors::empty_color, | ||
| const Color & | lines_color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a sequence of points connected by lines using billboard squares or spheres like DebugDraw3D.draw_line_path.
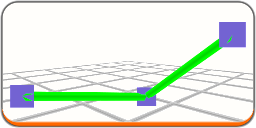
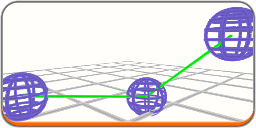
| path | Sequence of points |
| type | Type of points |
| points_color | Color of points |
| lines_color | Color of lines |
| size | Size of squares |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_points | ( | const PackedVector3Array & | points, |
| const PointType | type = PointType::POINT_TYPE_SQUARE, | ||
| const real_t & | size = 0.25f, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a sequence of points using billboard squares or spheres.
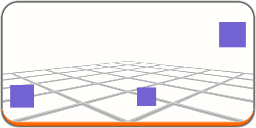
| points | Sequence of points |
| type | Type of points |
| size | Size of squares |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_square | ( | const Vector3 & | position, |
| const real_t & | size = 0.2f, | ||
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw a square that will always be turned towards the camera
| position | Center position of square |
| size | Square size |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_plane | ( | const Plane & | plane, |
| const Color & | color = Colors::empty_color, | ||
| const Vector3 & | anchor_point = Vector3(INFINITY, INFINITY, INFINITY), | ||
| const real_t & | duration = 0 ) |
Draws a plane of non-infinite size relative to the position of the current camera.
The plane size is set based on the Far parameter of the current camera or with DebugDraw3DScopeConfig.set_plane_size.
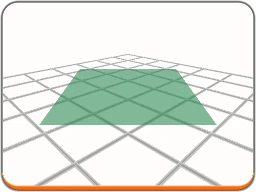
| plane | Plane data |
| color | Primary color |
| anchor_point | A point that is projected onto a Plane, and its projection is used as the center of the drawn plane |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_position | ( | const Transform3D & | transform, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw 3 intersecting lines with the given transformations
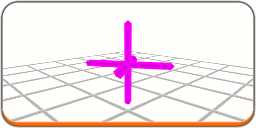
| transform | Transform3D of lines |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_gizmo | ( | const Transform3D & | transform, |
| const Color & | color = Colors::empty_color, | ||
| const bool & | is_centered = false, | ||
| const real_t & | duration = 0 ) |
Draw 3 lines with the given transformations and arrows at the ends
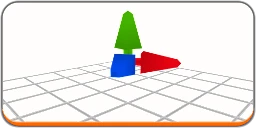
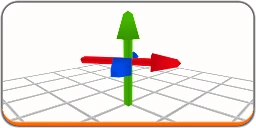
| transform | Transform3D of lines |
| color | Primary color |
| is_centered | If true, then the lines will intersect in the center of the transform |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_grid | ( | const Vector3 & | origin, |
| const Vector3 & | x_size, | ||
| const Vector3 & | y_size, | ||
| const Vector2i & | subdivision, | ||
| const Color & | color = Colors::empty_color, | ||
| const bool & | is_centered = true, | ||
| const real_t & | duration = 0 ) |
Draw simple grid with given size and subdivision
| origin | Grid origin |
| x_size | Direction and size of the X side. As an axis in the Basis. |
| y_size | Direction and size of the Y side. As an axis in the Basis. |
| subdivision | Number of cells for the X and Y axes |
| color | Primary color |
| is_centered | Draw lines relative to origin |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_grid_xf | ( | const Transform3D & | transform, |
| const Vector2i & | p_subdivision, | ||
| const Color & | color = Colors::empty_color, | ||
| const bool & | is_centered = true, | ||
| const real_t & | duration = 0 ) |
Draw a simple grid with a given transform and subdivision.
Like DebugDraw3D.draw_grid, but instead of origin, x_size and y_size, a single transform is used.
| transform | Transform3D of the Grid |
| p_subdivision | Number of cells for the X and Y axes |
| color | Primary color |
| is_centered | Draw lines relative to origin |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_camera_frustum | ( | const class godot::Camera3D * | camera, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw camera frustum area.
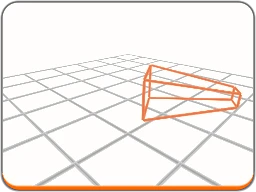
| camera | Camera node |
| color | Primary color |
| duration | The duration of how long the object will be visible |
| void DebugDraw3D::draw_camera_frustum_planes | ( | const Array & | camera_frustum, |
| const Color & | color = Colors::empty_color, | ||
| const real_t & | duration = 0 ) |
Draw the frustum area of the camera based on an array of 6 planes.
| camera_frustum | Array of frustum planes |
| color | Primary color |
| duration | The duration of how long the object will be visible |