|
Debug Draw 3D (and 2D) 1.4.0
Draw 3D debug graphics and 2D overlays with this add-on.
|
|
Debug Draw 3D (and 2D) 1.4.0
Draw 3D debug graphics and 2D overlays with this add-on.
|
This class is used to override scope parameters for DebugDraw3D. More...
#include <config_scope_3d.h>
Public Member Functions | |
| Ref< DebugDraw3DScopeConfig > | set_thickness (real_t _value) |
| real_t | get_thickness () const |
| Ref< DebugDraw3DScopeConfig > | set_center_brightness (real_t _value) |
| real_t | get_center_brightness () const |
| Ref< DebugDraw3DScopeConfig > | set_hd_sphere (bool _value) |
| bool | is_hd_sphere () const |
| Ref< DebugDraw3DScopeConfig > | set_plane_size (real_t _value) |
| real_t | get_plane_size () const |
| Ref< DebugDraw3DScopeConfig > | set_viewport (Viewport *_value) |
| Viewport * | get_viewport () const |
This class is used to override scope parameters for DebugDraw3D.
Scope means that these overridden parameters will affect the drawn geometry until it exits the current scope.
To create it, use DebugDraw3D.new_scoped_config. Immediately after creation, you can change the values and save the reference in a variable.
awaits unless this object is freed before await. So, narrow the scope if you want to use await and DebugDraw3DScopeConfig in the same method. | Ref< DebugDraw3DScopeConfig > DebugDraw3DScopeConfig::set_thickness | ( | real_t | _value | ) |
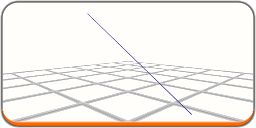
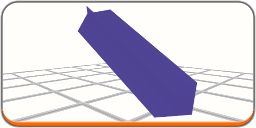
Set the thickness of the volumetric lines. If the value is 0, the standard wireframe rendering will be used.
| Ref< DebugDraw3DScopeConfig > DebugDraw3DScopeConfig::set_center_brightness | ( | real_t | _value | ) |
Set the brightness of the central part of the volumetric lines.
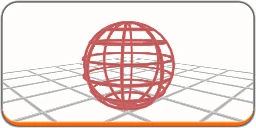
| Ref< DebugDraw3DScopeConfig > DebugDraw3DScopeConfig::set_hd_sphere | ( | bool | _value | ) |
Set the mesh density of the sphere
| Ref< DebugDraw3DScopeConfig > DebugDraw3DScopeConfig::set_plane_size | ( | real_t | _value | ) |
Set the size of the Plane in DebugDraw3D.draw_plane. If set to INF, the Far parameter of the current camera will be used.
| Ref< DebugDraw3DScopeConfig > DebugDraw3DScopeConfig::set_viewport | ( | Viewport * | _value | ) |
Set which Viewport will be used to get World3D.
If the World3D of this Viewport has not been used before, then the owner of this World3D will be found in the current branch of the tree, and special observer nodes will be added to it.